Efficient and Accurate Candidate Generation for Grasp Pose
Por um escritor misterioso
Last updated 27 janeiro 2025

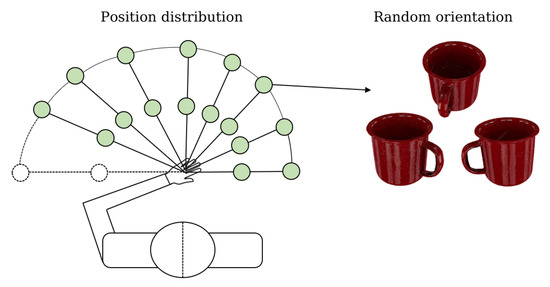
Recently, a number of grasp detection methods have been proposed that can be used to localize robotic grasp configurations directly from sensor data without estimating object pose. The underlying idea is to treat grasp perception analogously to object detection in computer vision. These methods take as input a noisy and partially occluded RGBD image or point cloud and produce as output pose estimates of viable grasps, without assuming a known CAD model of the object. Although these methods generalize grasp knowledge to new objects well, they have not yet been demonstrated to be reliable enough for wide use. Many grasp detection methods achieve grasp success rates (grasp successes as a fraction of the total number of grasp attempts) between 75% and 95% for novel objects presented in isolation or in light clutter. Not only are these success rates too low for practical grasping applications, but the light clutter scenarios that are evaluated often do not reflect the realities of real world grasping. This paper proposes a number of innovations that together result in a significant improvement in grasp detection performance. The specific improvement in performance due to each of our contributions is quantitatively measured either in simulation or on robotic hardware. Ultimately, we report a series of robotic experiments that average a 93% end-to-end grasp success rate for novel objects presented in dense clutter.

PDF] Efficient and Accurate Candidate Generation for Grasp Pose
Biomimetics, Free Full-Text
Machines, Free Full-Text

PDF] Efficient and Accurate Candidate Generation for Grasp Pose
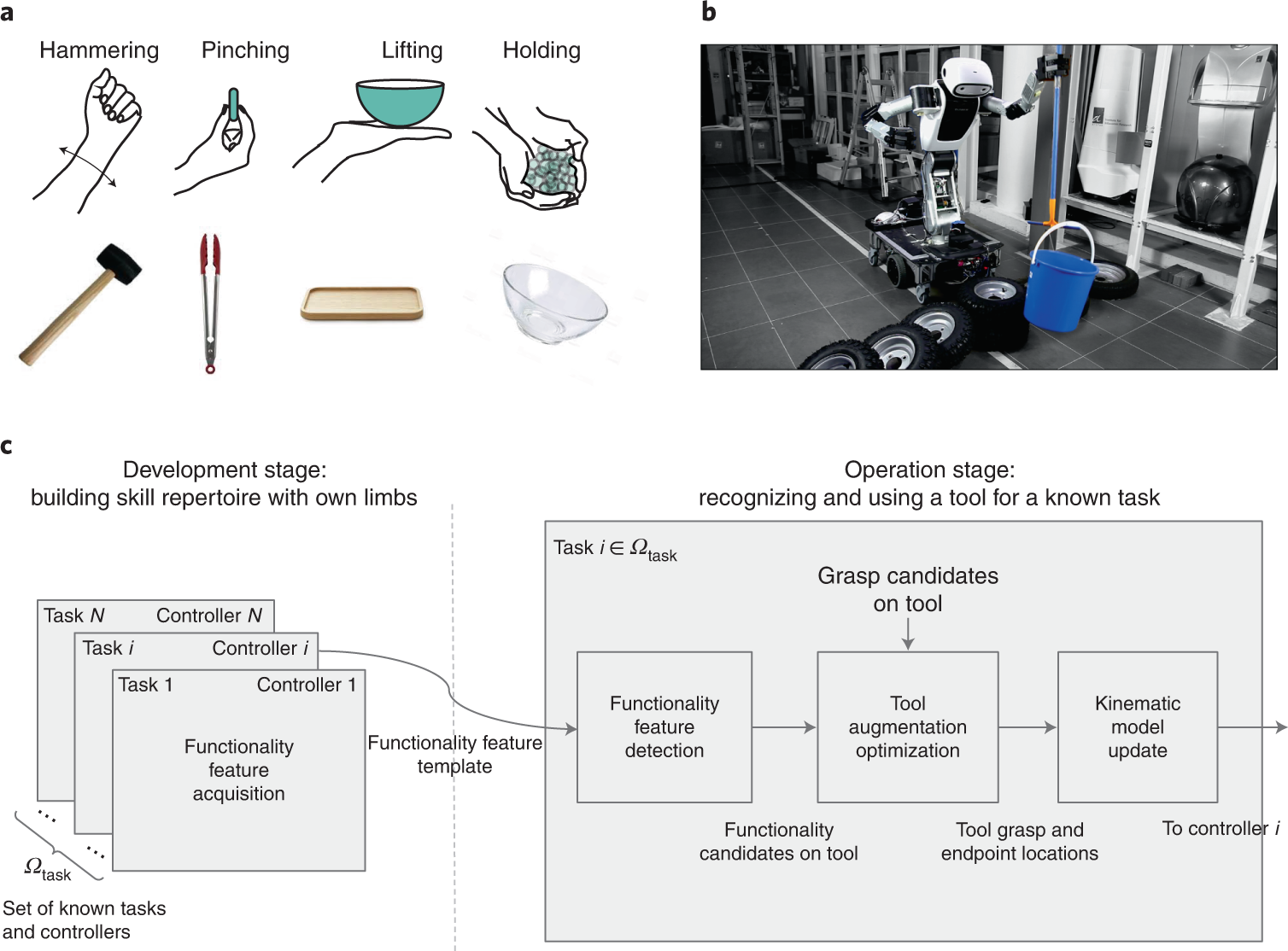
A framework for tool cognition in robots without prior tool

PDF) Efficient and Accurate Candidate Generation for Grasp Pose
PDF] Efficient and Accurate Candidate Generation for Grasp Pose

PDF] Efficient and Accurate Candidate Generation for Grasp Pose

PDF] Efficient and Accurate Candidate Generation for Grasp Pose

Planning for grasping cluttered objects based on obstruction

The architecture of GraspCVAE. (a) In training, it takes both

3D Grasping Pose Detection Method Based on Improved PointNet
Research Dr. Miao Li
Frontiers Learning-based robotic grasping: A review
6-DoF grasp pose estimation based on instance reconstruction
Recomendado para você
-
 Eleição para Convencionais da Anfip: sua participação é importante27 janeiro 2025
Eleição para Convencionais da Anfip: sua participação é importante27 janeiro 2025 -
 Cuidar +” : Palmela tem teleassistência 24h/dia e 365 dias/ano27 janeiro 2025
Cuidar +” : Palmela tem teleassistência 24h/dia e 365 dias/ano27 janeiro 2025 -
 Candidate-se e junte-se à nossa equipa27 janeiro 2025
Candidate-se e junte-se à nossa equipa27 janeiro 2025 -
 Candidate-se ao Condim27 janeiro 2025
Candidate-se ao Condim27 janeiro 2025 -
 S.E. Cupp: What's the point of debates anymore?27 janeiro 2025
S.E. Cupp: What's the point of debates anymore?27 janeiro 2025 -
 Se Candidate, Mulher! levanta R$ 1,2 mi para acelerar27 janeiro 2025
Se Candidate, Mulher! levanta R$ 1,2 mi para acelerar27 janeiro 2025 -
 S.E. Cupp: DeSantis is a candidate without a cause or hope – News27 janeiro 2025
S.E. Cupp: DeSantis is a candidate without a cause or hope – News27 janeiro 2025 -
 Candidate-se aos Novos Grupos Temáticos do Fórum Doenças Crônicas27 janeiro 2025
Candidate-se aos Novos Grupos Temáticos do Fórum Doenças Crônicas27 janeiro 2025 -
 Reforma Administrativa: candidate-se agora a uma vaga na Comissão27 janeiro 2025
Reforma Administrativa: candidate-se agora a uma vaga na Comissão27 janeiro 2025 -
 CIMLT PROCEDIMENTO CONCURSAL – RECRUTAMENTO BOMBEIRO SAPADOR FLORESTAL (até 13 novembro 2023) - Câmara Municipal de Alpiarça - Município de Alpiarça27 janeiro 2025
CIMLT PROCEDIMENTO CONCURSAL – RECRUTAMENTO BOMBEIRO SAPADOR FLORESTAL (até 13 novembro 2023) - Câmara Municipal de Alpiarça - Município de Alpiarça27 janeiro 2025
você pode gostar
-
 Poke in St. Louis, Poke Munch, Food, Fish, Chicken27 janeiro 2025
Poke in St. Louis, Poke Munch, Food, Fish, Chicken27 janeiro 2025 -
 Hillsborough County Wage Theft27 janeiro 2025
Hillsborough County Wage Theft27 janeiro 2025 -
 kim fields crying meme|TikTok Search27 janeiro 2025
kim fields crying meme|TikTok Search27 janeiro 2025 -
 Category:Rate my team, Roblox: All Star Tower Defense Wiki27 janeiro 2025
Category:Rate my team, Roblox: All Star Tower Defense Wiki27 janeiro 2025 -
 Se lanzó un nuevo avance para el regreso de «Mahoutsukai no Yome27 janeiro 2025
Se lanzó un nuevo avance para el regreso de «Mahoutsukai no Yome27 janeiro 2025 -
 Dragon Ball Z Super Saiyan Blue Kaioken Goku Action Figure Statue PVC Model Gift27 janeiro 2025
Dragon Ball Z Super Saiyan Blue Kaioken Goku Action Figure Statue PVC Model Gift27 janeiro 2025 -
 Sixteen ~ Real Friends Pop punk lyrics, Real friends lyrics, Real friends27 janeiro 2025
Sixteen ~ Real Friends Pop punk lyrics, Real friends lyrics, Real friends27 janeiro 2025 -
 Missões de paramédico, Grand Theft Auto Wiki27 janeiro 2025
Missões de paramédico, Grand Theft Auto Wiki27 janeiro 2025 -
 Anisphia Wynn Palettia, The Magical Revolution of the Reincarnated Princess and the Genius Young Lady Wiki27 janeiro 2025
Anisphia Wynn Palettia, The Magical Revolution of the Reincarnated Princess and the Genius Young Lady Wiki27 janeiro 2025 -
 Imitação de tamanho grande para crianças, criativo 2019, 1:64, caminhão basculante inercial, carro móvel, máquinas de brinquedo, caminhão para27 janeiro 2025
Imitação de tamanho grande para crianças, criativo 2019, 1:64, caminhão basculante inercial, carro móvel, máquinas de brinquedo, caminhão para27 janeiro 2025